🖉 Facts about Lie Groups and Algebras
In Spring 2016 I was taking 18.757 Representations of Lie Algebras. Since I knew next to nothing about either Lie groups or algebras, I was forced to quickly learn about their basic facts and properties. These are the notes that I wrote up accordingly. Proofs of most of these facts can be found in standard textbooks, for example Kirillov.
1. Lie groups
Let or , depending on taste.
Definition 1. A Lie group is a group which is also a -manifold; the multiplication maps (by ) and the inversion map (by ) are required to be smooth.
A morphism of Lie groups is a map which is both a map of manifolds and a group homomorphism.
Throughout, we will let denote the identity, or if we need further emphasis.
Note that in particular, every group can be made into a Lie group by endowing it with the discrete topology. This is silly, so we usually require only focus on connected groups:
Proposition 2 (Reduction to connected Lie groups)
Let be a Lie group and the connected component of which contains . Then is a normal subgroup, itself a Lie group, and the quotient has the discrete topology.
In fact, we can also reduce this to the study of simply connected Lie groups as follows.
Proposition 3 (Reduction to simply connected Lie groups)
If is connected, let be its universal cover. Then is a Lie group, is a morphism of Lie groups, and .
Here are some examples of Lie groups.
Example 4 (Examples of Lie groups)
- under addition is a real one-dimensional Lie group.
- under addition is a complex one-dimensional Lie group (and a two-dimensional real Lie group)!
- The unit circle is a real Lie group under multiplication.
- is a Lie group of dimension . This example becomes important for representation theory: a representation of a Lie group is a morphism of Lie groups .
- is a Lie group of dimension .
As geometric objects, Lie groups enjoy a huge amount of symmetry. For example, any neighborhood of can be “copied over” to any other point by the natural map . There is another theorem worth noting, which is that:
Proposition 5. If is a connected Lie group and is a neighborhood of the identity , then generates as a group.
2. Haar measure
Recall the following result and its proof from representation theory:
Claim 6. For any finite group , is semisimple; all finite-dimensional representations decompose into irreducibles.
Proof: Take a representation and equip it with an arbitrary inner form . Then we can average it to obtain a new inner form which is -invariant. Thus given a subrepresentation we can just take its orthogonal complement to decompose .
We would like to repeat this type of proof with Lie groups. In this case the notion doesn’t make sense, so we want to replace it with an integral instead. In order to do this we use the following:
Theorem 7 (Haar measure)
Let be a Lie group. Then there exists a unique Radon measure (up to scaling) on which is left-invariant, meaning for any Borel subset and “translate” . This measure is called the (left) Haar measure.
Example 8 (Examples of Haar measures)
- The Haar measure on is the standard Lebesgue measure which assigns to the closed interval . Of course for any , for .
- The Haar measure on is given by
In particular, . One sees the invariance under multiplication of these intervals.
- Let . Then a Haar measure is given by
- For the circle group , consider . We can define
across complex arguments . The normalization factor of ensures .
Note that we have:
Corollary 9. If the Lie group is compact, there is a unique Haar measure with .
This follows by just noting that if is Radon measure on , then . This now lets us deduce that
Corollary 10 (Compact Lie groups are semisimple)
is semisimple for any compact Lie group .
Indeed, we can now consider as we described at the beginning.
3. The tangent space at the identity
In light of the previous comment about neighborhoods of generating , we see that to get some information about the entire Lie group it actually suffices to just get “local” information of at the point (this is one formalization of the fact that Lie groups are super symmetric).
To do this one idea is to look at the tangent space. Let be an -dimensional Lie group (over ) and consider the tangent space to at the identity . Naturally, this is a -vector space of dimension . We call it the Lie algebra associated to .
Example 11 (Lie algebras corresponding to Lie groups)
- has a real Lie algebra isomorphic to .
- has a complex Lie algebra isomorphic to .
- The unit circle has a real Lie algebra isomorphic to , which we think of as the “tangent line” at the point .
Example 12 ()
Let’s consider , an open subset of . Its tangent space should just be an -dimensional -vector space. By identifying the components in the obvious way, we can think of this Lie algebra as just the set of all matrices.
This Lie algebra goes by the notation .
Example 13 ()
Recall is a Lie group of dimension , hence its Lie algebra should have dimension . To see what it is, let’s look at the special case first: then Viewing this as a polynomial surface in , we compute and in particular the tangent space to the identity matrix is given by the orthogonal complement of the gradient Hence the tangent plane can be identified with matrices satisfying . In other words, we see By repeating this example in greater generality, we discover
4. The exponential map
Right now, is just a vector space. However, by using the group structure we can get a map from back into . The trick is “differential equations”:
Proposition 14 (Differential equations for Lie theorists)
Let be a Lie group over and its Lie algebra. Then for every there is a unique homomorphism which is a morphism of Lie groups, such that We will write to emphasize the argument being thought of as “time”.
Thus this proposition should be intuitively clear: the theory of differential equations guarantees that is defined and unique in a small neighborhood of . Then, the group structure allows us to extend uniquely to the rest of , giving a trajectory across all of . This is sometimes called a one-parameter subgroup of , but we won’t use this terminology anywhere in what follows.
This lets us define:
Definition 15. Retain the setting of the previous proposition. Then the exponential map is defined by
The exponential map gets its name from the fact that for all the examples I discussed before, it is actually just the map . Note that below, for a matrix ; this is called the matrix exponential.
Example 16 (Exponential Maps of Lie algebras)
- If , then too. Then (where ) is a morphism of Lie groups . Hence In other words, the exponential map is the identity.
- Ditto for .
- For and , the map given by works. Hence
- For , the map given by works nicely (now is a matrix). (Note that we have to check is actually invertible for this map to be well-defined.) Hence the exponential map is given by
- Similarly, Here we had to check that if , meaning , then . This can be seen by writing in an upper triangular basis.
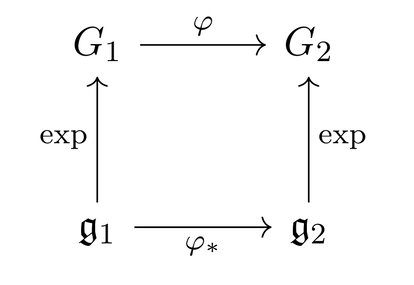
Actually, taking the tangent space at the identity is a functor. Consider a map of Lie groups, with lie algebras and . Because is a group homomorphism, . Now, by manifold theory we know that maps between manifolds gives a linear map between the corresponding tangent spaces, say . For us we obtain a linear map In fact, this fits into a diagram
Here are a few more properties of :
- , which is immediate by looking at the constant trajectory .
- , i.e. the total derivative is the identity. This is again by construction.
- In particular, by the inverse function theorem this implies that is a diffeomorphism in a neighborhood of , onto a neighborhood of .
- commutes with the commutator. (By the above diagram.)
5. The commutator
Right now is still just a vector space, the tangent space. But now that there is map , we can use it to put a new operation on , the so-called commutator.
The idea is follows: we want to “multiply” two elements of . But is just a vector space, so we can’t do that. However, itself has a group multiplication, so we should pass to using , use the multiplication in the group and then come back.
Here are the details. As we just mentioned, is a diffeomorphism near . So for , close to the origin of , we can look at and , which are two elements of close to . Multiplying them gives an element still close to , so its equal to for some unique , call it .
One can show in fact that can be written as a Taylor series in two variables as where is a skew-symmetric bilinear map, meaning . It will be more convenient to work with than itself, so we give it a name:
Definition 17. This is called the commutator of .
Now we know multiplication in is associative, so this should give us some nontrivial relation on the bracket . Specifically, since we should have that , and this should tell us something. In fact, the claim is:
Theorem 18. The bracket satisfies the Jacobi identity
Proof: Although I won’t prove it, the third-order terms (and all the rest) in our definition of can be written out explicitly as well: for example, for example, we actually have
The general formula is called the Baker-Campbell-Hausdorff formula.
Then we can force ourselves to expand this using the first three terms of the BCS formula and then equate the degree three terms. The left-hand side expands initially as , and the next step would be something ugly.
This computation is horrifying and painful, so I’ll pretend I did it and tell you the end result is as claimed.
There is a more natural way to see why this identity is the “right one”; see Qiaochu. However, with this proof I want to make the point that this Jacobi identity is not our decision: instead, the Jacobi identity is forced upon us by associativity in .
Example 19 (Examples of commutators attached to Lie groups)
- If is an abelian group, we have by symmetry and from . Thus in for any abelian Lie group .
- In particular, the brackets for are trivial.
- Let . Then one can show that
- Ditto for .
In any case, with the Jacobi identity we can define an general Lie algebra as an intrinsic object with a Jacobi-satisfying bracket:
Definition 20. A Lie algebra over is a -vector space equipped with a skew-symmetric bilinear bracket satisfying the Jacobi identity.
A morphism of Lie algebras and preserves the bracket.
Note that a Lie algebra may even be infinite-dimensional (even though we are assuming is finite-dimensional, so that they will never come up as a tangent space).
Example 21 (Associative algebra Lie algebra)
Any associative algebra over can be made into a Lie algebra by taking the same underlying vector space, and using the bracket .
6. The fundamental theorems
We finish this list of facts by stating the three “fundamental theorems” of Lie theory. They are based upon the functor we have described earlier, which is a functor
- from the category of Lie groups
- into the category of finite-dimensional Lie algebras.
The first theorem requires the following definition:
Definition 22. A Lie subgroup of a Lie group is a subgroup such that the inclusion map is also an injective immersion.
A Lie subalgebra of a Lie algebra is a vector subspace preserved under the bracket (meaning that ).
Theorem 23 (Lie I)
Let be a real or complex Lie group with Lie algebra . Then given a Lie subgroup , the map is a bijection between Lie subgroups of and Lie subalgebras of .
Theorem 24 (The Lie functor is an equivalence of categories)
Restrict to a functor
- from the category of simply connected Lie groups over
- to the category of finite-dimensional Lie algebras over .
Then
- (Lie II) is fully faithful, and
- (Lie III) is essentially surjective on objects.
If we drop the “simply connected” condition, we obtain a functor which is faithful and exact, but not full: non-isomorphic Lie groups can have isomorphic Lie algebras (one example is and ).